
ParSpdCtrl → TgtSpd - Target for the motor speed, -REAL-
The TgtSpd input defines the desired motor speed. This input specifies the rotational speed the motor should achieve, and it is typically expressed in units such as RPM (revolutions per minute), rad/s, or as a percentage of the motor’s nominal speed, depending on system configuration. This input works in conjunction with the predefined acceleration and jerk limits to ensure smooth and controlled transitions to the target speed. The function will gradually adjust the motor’s speed towards the setpoint, adhering to the specified dynamics.
According to figure 1, when the function is enabled (as seen from the Enb signal at the top), it immediately responds to any changes in the TgtSpd input. The speed trajectory (SpdTrj ) closely follows the target speed setpoint with smooth transitions, respecting the configured acceleration (AccTrj ) and jerk limits. Each adjustment in the target speed is reflected in the output SpdTrj.
The graph also shows how the acceleration profile (AccTrj ) adapts according to the changes in the target speed, indicating that the function continuously calculates the necessary acceleration to reach the setpoint.
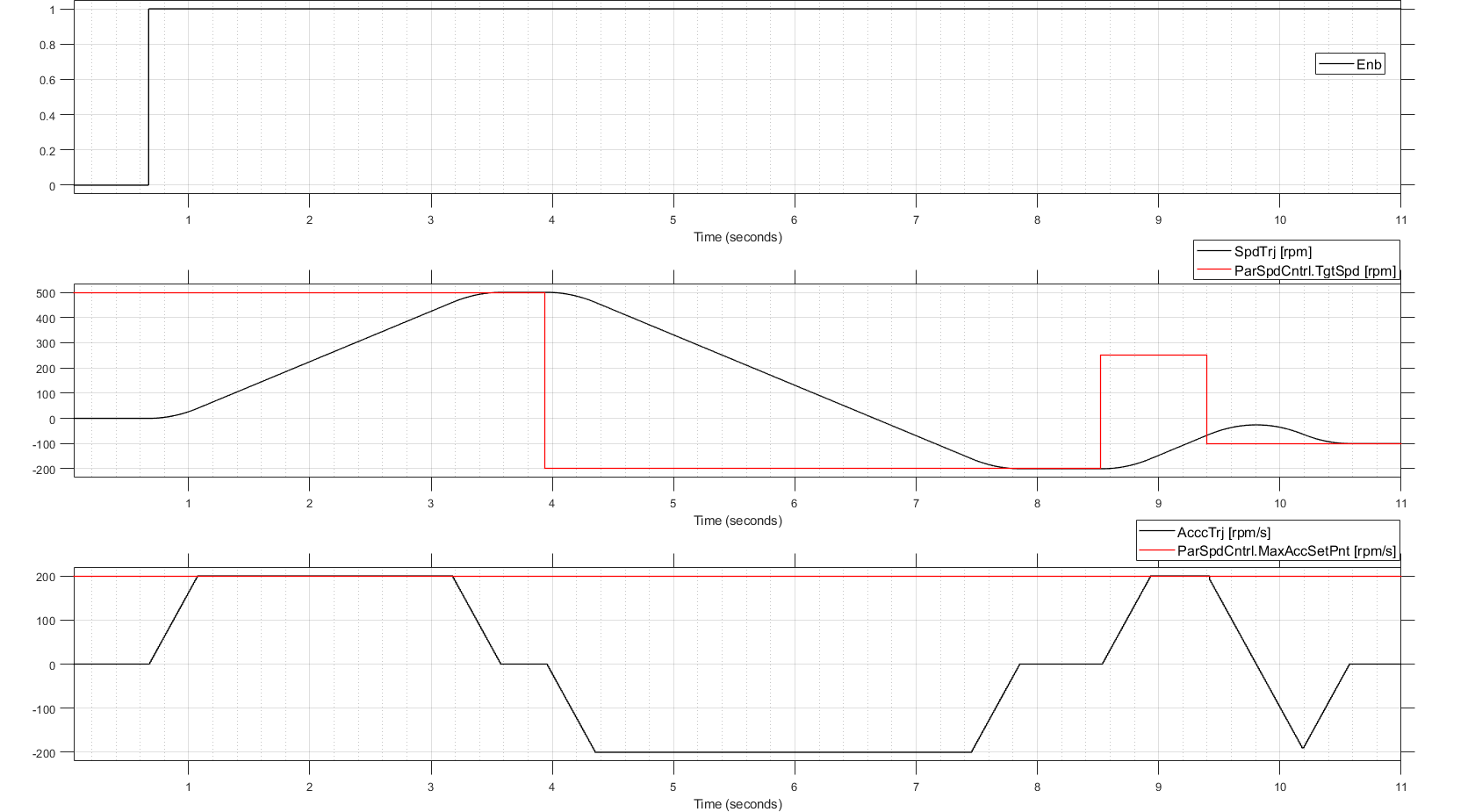 Figure 1: General behavior of the function.
Figure 1: General behavior of the function.
Figure 1: General behavior of the function. ParSpdCtrl → MaxAccSetPnt - Maximum Motor Acceleration/Deceleration, -REAL-
The MaxAccSetPnt input defines the maximum allowable acceleration for the motor when the function is controlling the motor speed. This parameter sets a limit on how quickly the motor can accelerate or decelerate when moving toward the target speed. The value of MaxAccSetPnt is typically expressed in units such as rpm/s or rad/s² or as a percentage of the motor’s nominal speed per second, depending on the system configuration. It ensures that the motor’s acceleration stays within safe or desired limits, preventing excessive wear on mechanical components and ensuring smooth transitions during speed changes.
According to figure 2, changes to the MaxAccSetPnt input are not possible during a speed transition. As shown, once the speed trajectory is in progress, the function does not respond to adjustments in the maximum acceleration setpoint until the transition has completed.
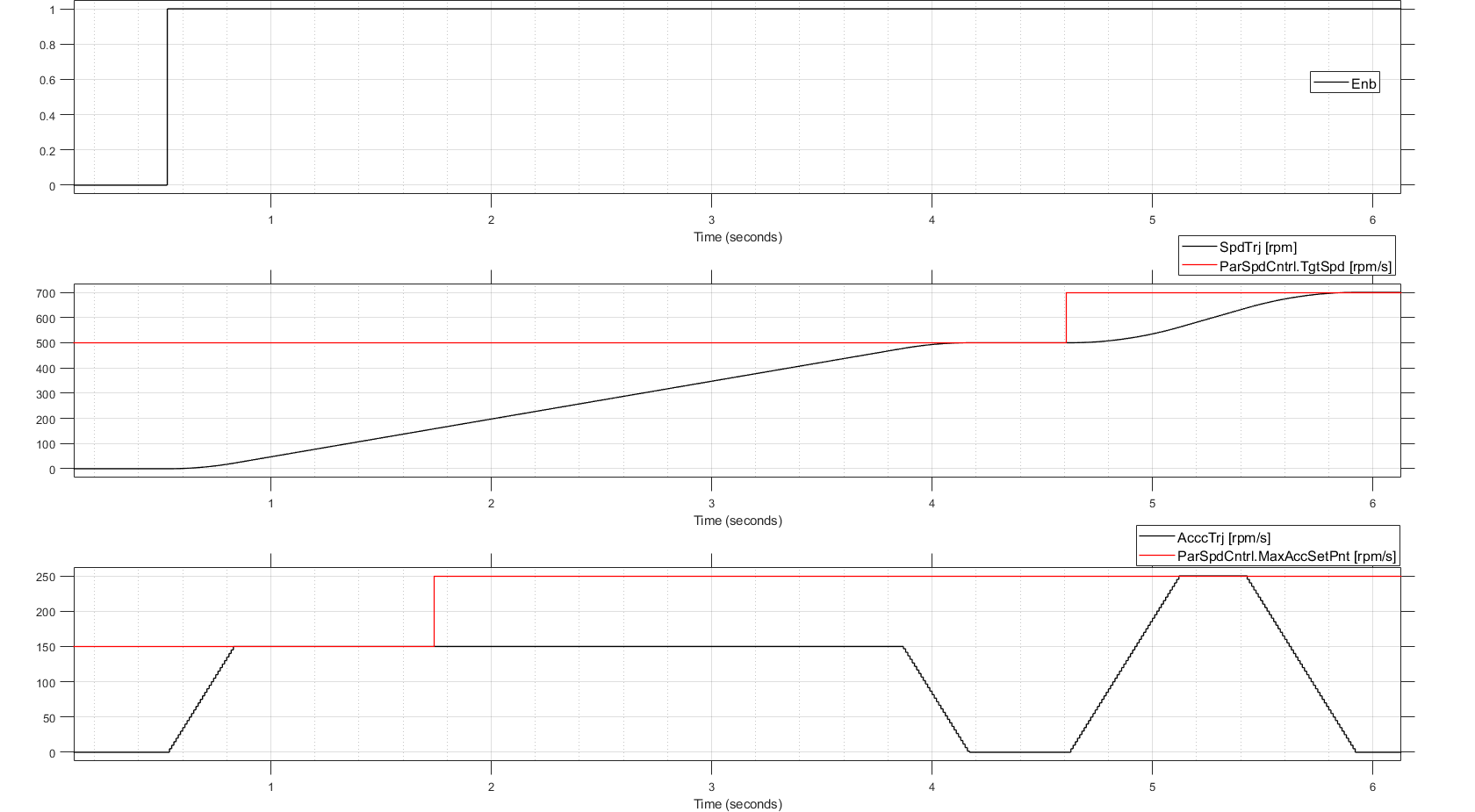 Figure2: Behavior of the function with different acceleration limit values
Figure2: Behavior of the function with different acceleration limit values
Figure2: Behavior of the function with different acceleration limit values ParStop → DecSetPnt - deceleration of the motor stop, -REAL-
The function block includes a stop feature that allows the motor to be halted immediately. As soon as a rising edge is detected on the Stop input, the function triggers a stop ramp to bring the motor to zero speed. The deceleration during this stop is defined by the DecSetPnt input, which can be configured in units such as [rpm/s], [rad/s²], or as a percentage of the nominal speed per second.
After the stop input is activated, normal operation of the function can only resume once the acknowledge (Ack ) input is activated. This ensures that the system is properly reset and ready for continued use after an emergency or controlled stop. See figure 3.
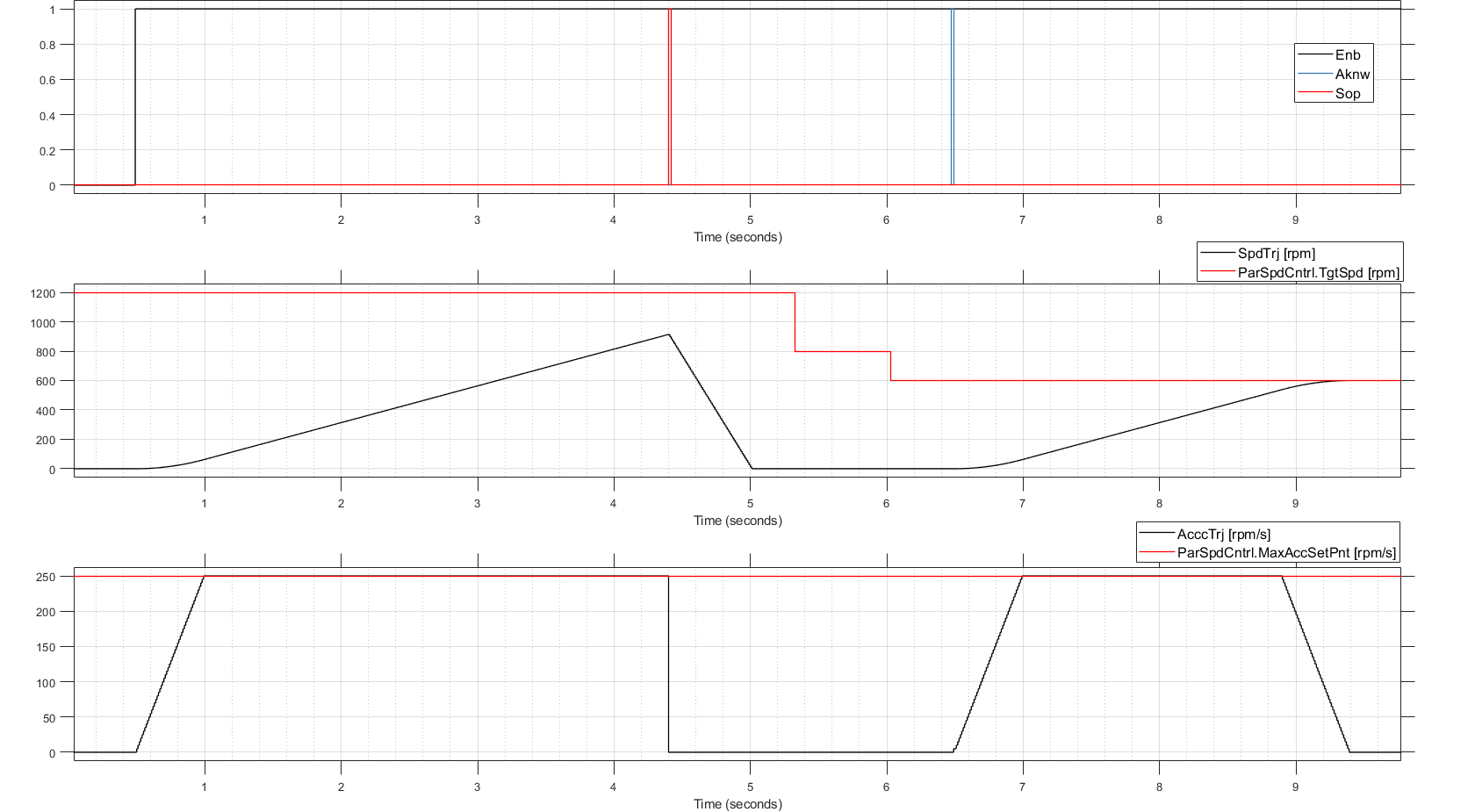 Figure 3: Maximum deceleration of the stop trajectory
Figure 3: Maximum deceleration of the stop trajectory
Figure 3: Maximum deceleration of the stop trajectory Enb - Turn controller on or off, -BOOL-
The Enb input is a boolean signal used to enable or disable the function. When the Enb input is set to True, the function block becomes active, allowing it to process inputs and generate outputs . If the Enb input is set to False , the function block is deactivated, and it will no longer respond to changes in the input setpoints. Additionally, when the function is disabled, the outputs are reset to zero.
When the Enb input transitions from False to True , the function generates a motor speed profile starting from the initial speed defined by InitSpd and with an initial acceleration defined by InitAcc . See table 1 and figure 4.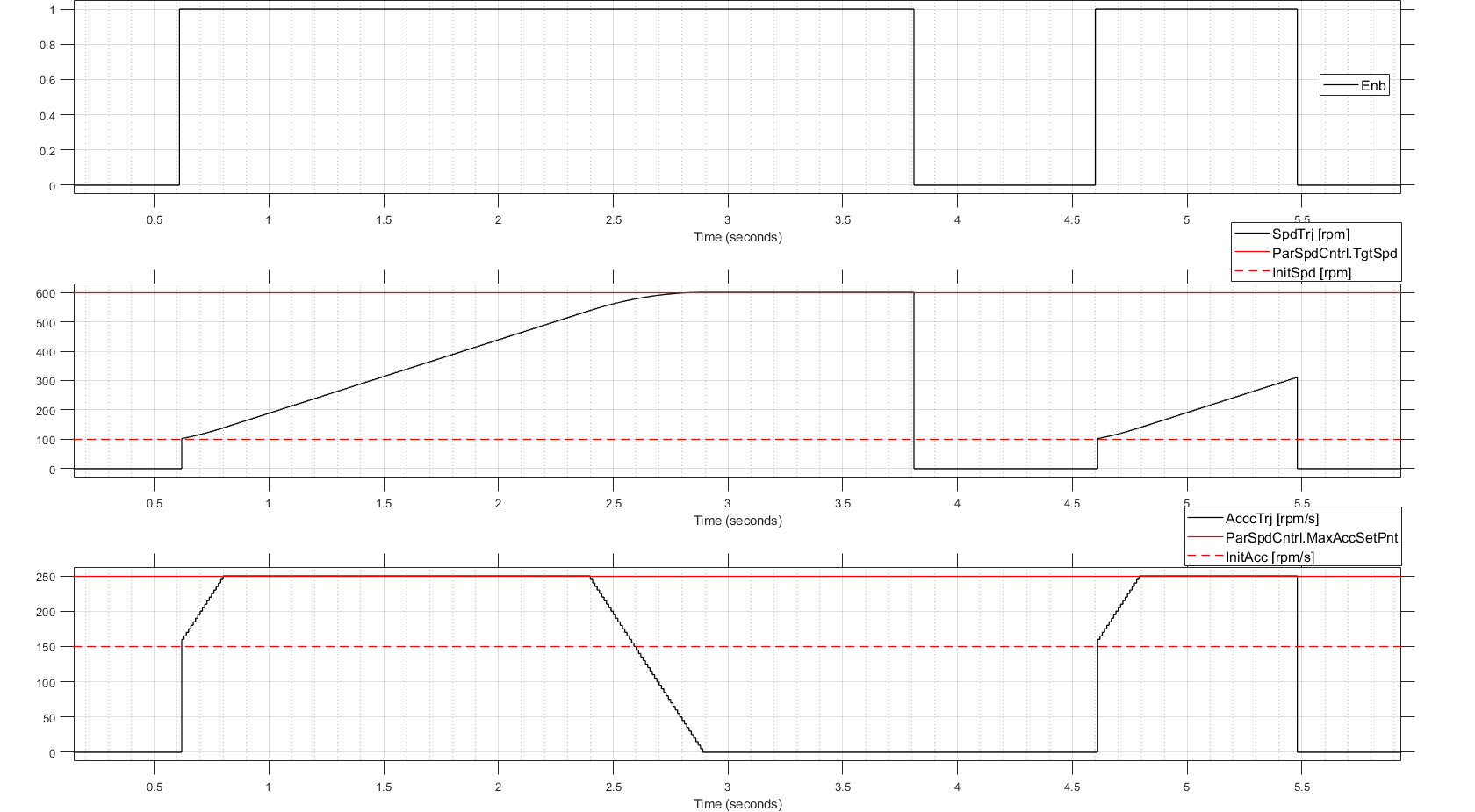
Figure 4: Behavior of the function when enabling and disabling
